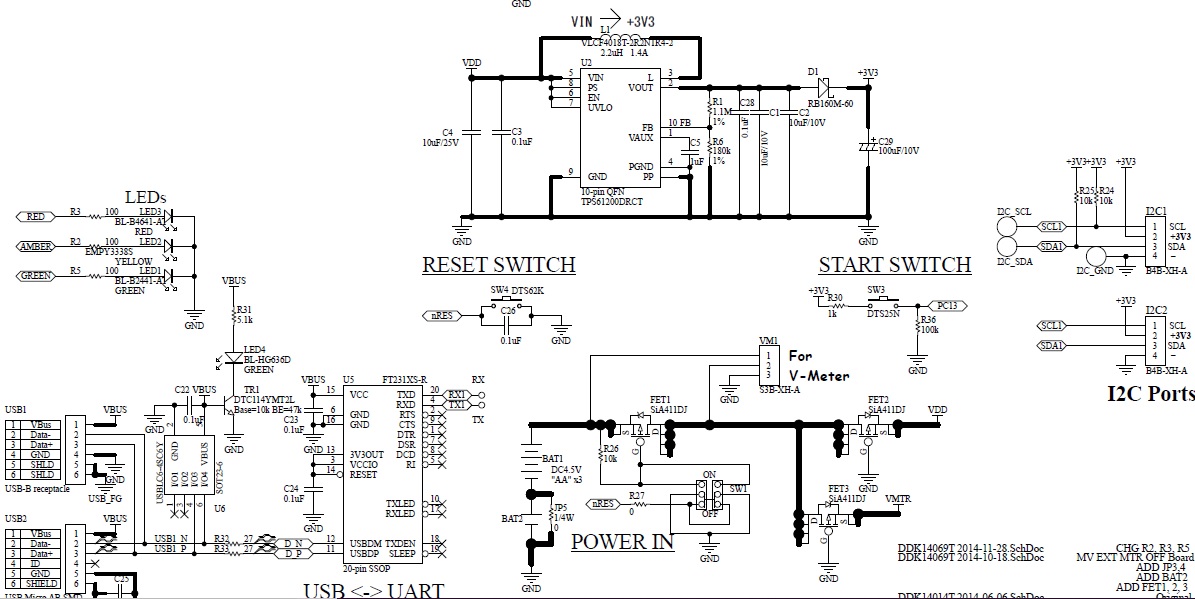
【αXplorerの部分回路図】
今回改造に必要な回路部分で、ロボットのVerにより回路が異なるので要注意。
旧Ver
新Ver
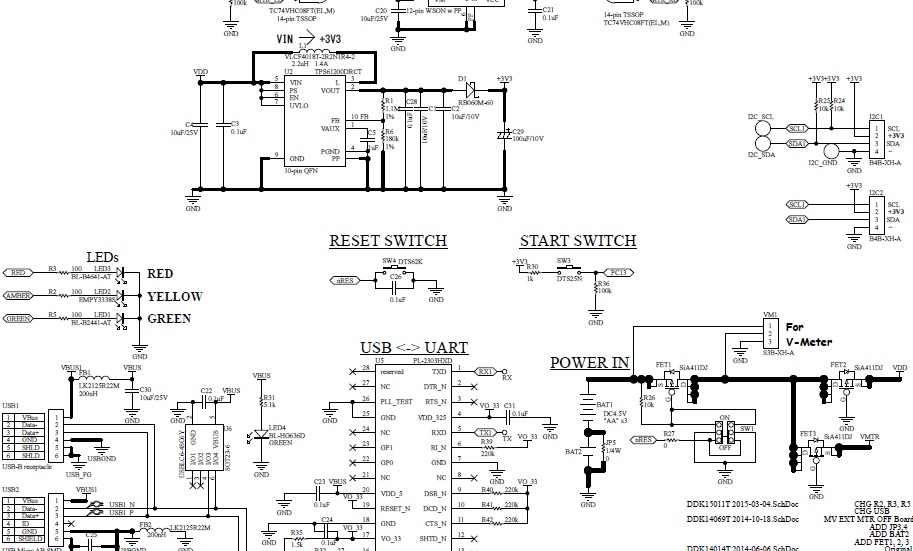
外部バッテリーは、単三電池5本(7.5V)に3端子レギュレーターで5Vを作りロボットのV-Meterに入力する。
今回使用するデバイスはすべて5V駆動
カラーセンサからの出力は5V、ロボットへの最大入力電圧は3.6Vなので抵抗分圧で最大電圧を3Vとする回路を必要とする。
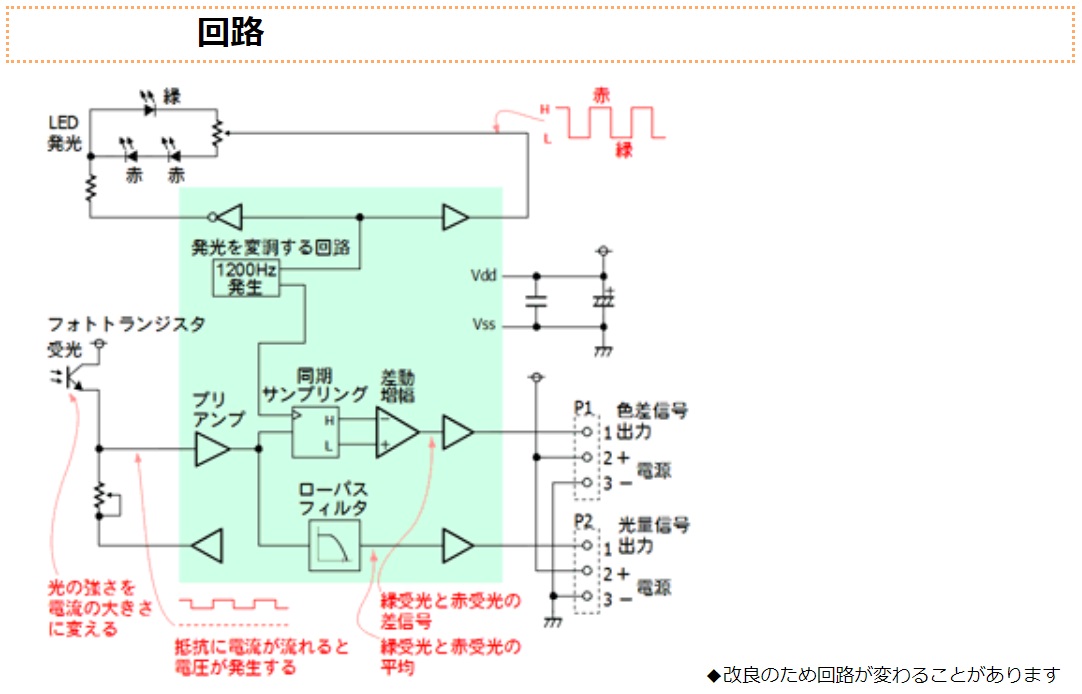
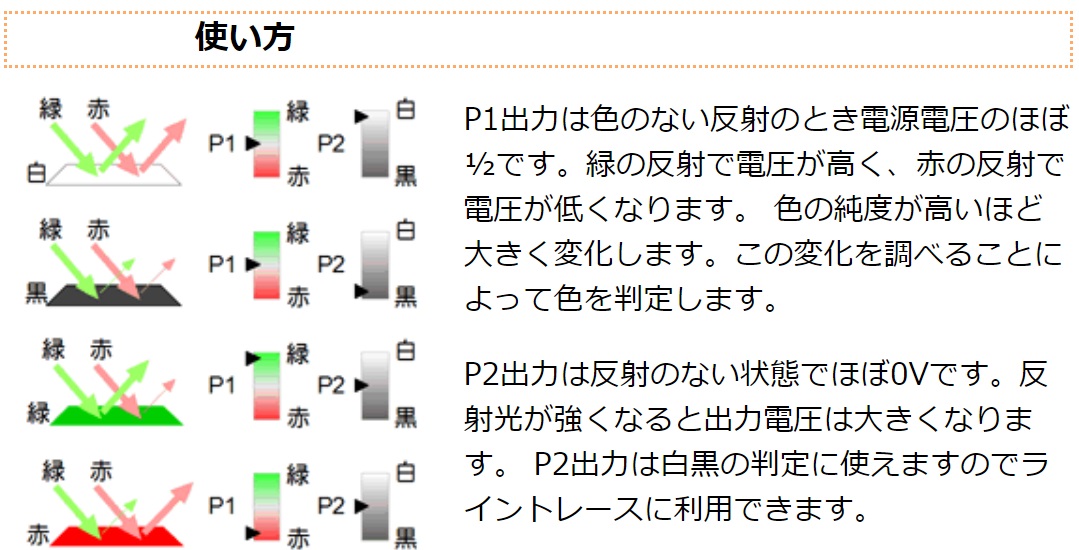
【カラーセンサ仕様】
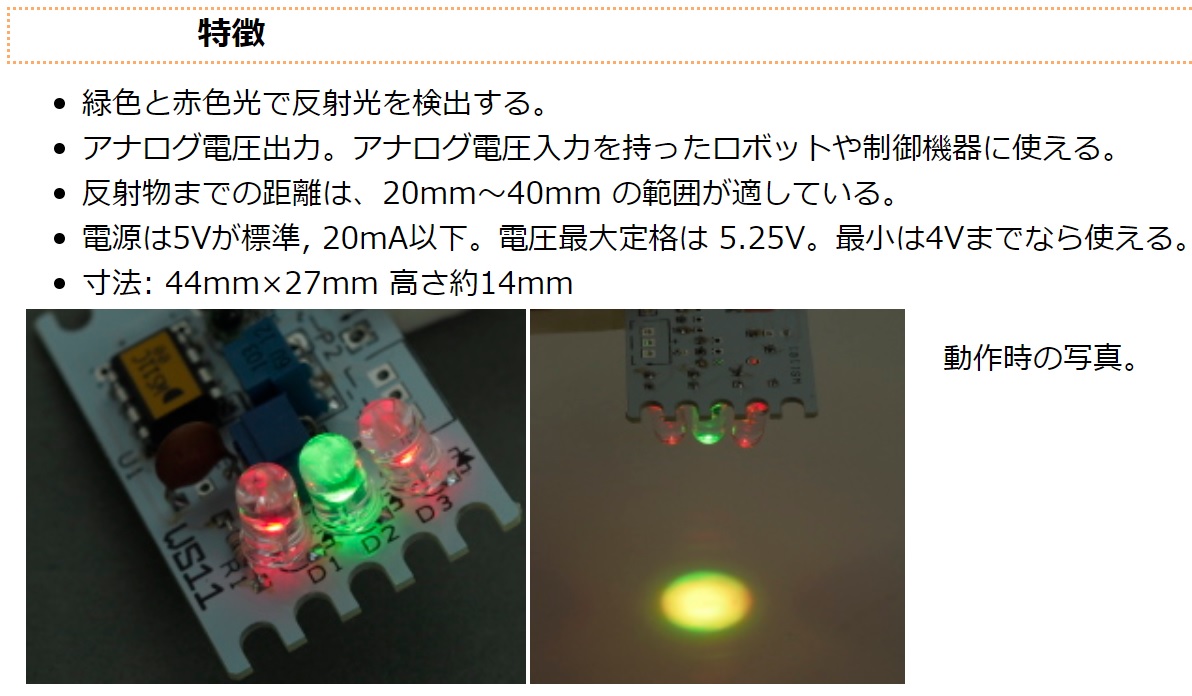
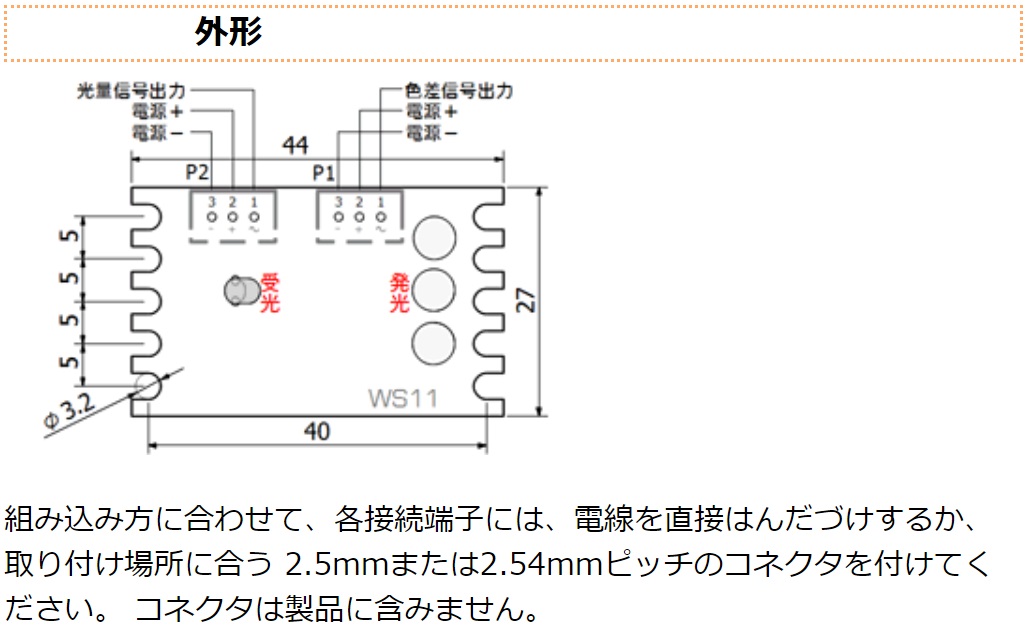

出力電圧を5Vから3Vに降圧させる(抵抗分圧)回路を基板上に置く。
【サーボモーター】

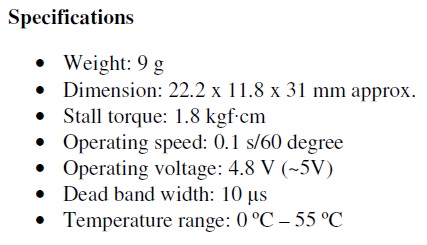
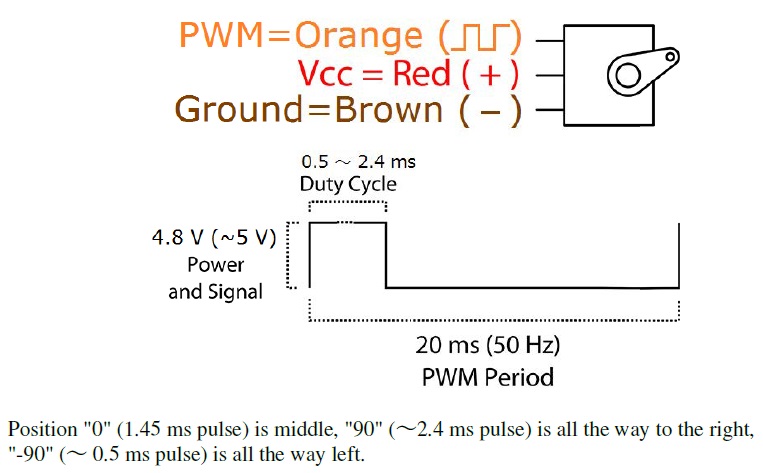
αXplorerの周期は、15ms(66.6Hz)なので確認が必要。パルス幅は仕様通りで問題なし。
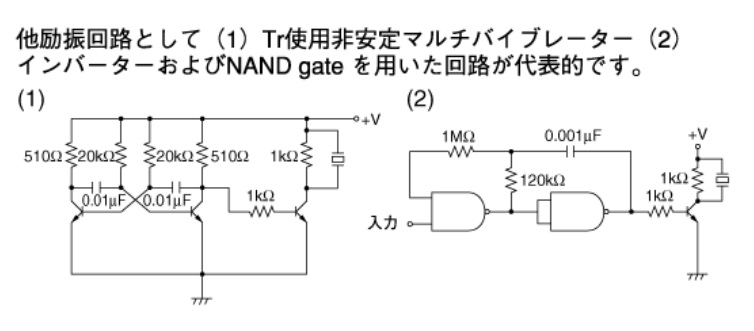
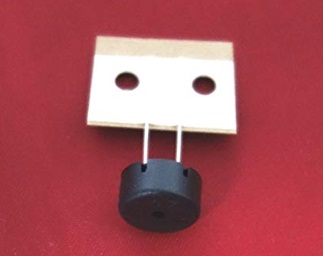
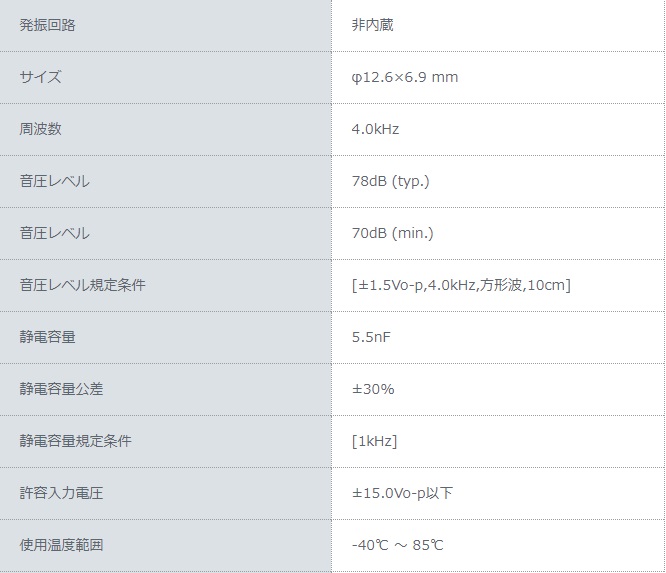
【圧電ブザー】
村田製作所製 : PKM13EPYH4000-A0(相当品)
仕 様
周波数特性

発信回路例